
Исходные данные автобуса низкопольного городского типа большого класса МАЗ-103 4×2:
База – 6140мм;
Колея – 2048мм;
Размерность шин – 11,00/70R22,5;
Полная масса – 18000кг;
Снаряженная масса – 10800кг;
Нагрузка на управляемую ось – 6500кг;
Тип рулевого механизма – винт и шариковая гайка-рейка;
Минимальный радиус поворота (по оси следа наружного колеса) – 11300;
Свободный радиус – 0,503м;
Статический радиус – 0,489м.
Выбор параметров.
Исходя из компоновки автомобиля, принимаем следующие размеры:
радиус обкатки, rσ – 0,065м;
расстояние между осями шкворней, j – 1918мм;
радиус вращения сошки, c – 0,16м;
радиус вращения поворотного рычага, 0,22м;
радиус рулевого колеса Rрк – 0,275м;
передаточное число рулевого привода:
передаточное число рулевого механизма:
Кинематический расчет рулевого управления заключается в определении углов поворота управляемых колес (см рис. 19), выбора параметров рулевой трапеции (см.рис 20).
![]()
где ![]() – углы поворота наружного и внутреннего колес
– углы поворота наружного и внутреннего колес
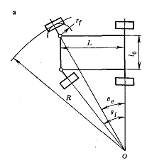
Рис. 19 Кинематика поворота жестких мостов с одним управляемым мостом.
Находим необходимые максимальные углы поворота колес при заданном Rmin
![]()
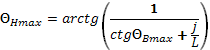
где j – расстояние между осями шкворней; L – база; Rmin – минимальный радиус поворота.
![]()
![]()

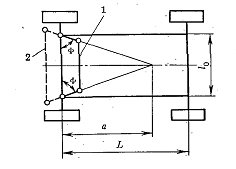
Рис. 20 Схема расположения задней 1 и передней 2 рулевой трапеции.
Далее выбираем параметры рулевой трапеции (рис.20). В существующих конструкциях расстояние x ≈0,7…0,8L. Тогда угол наклона бокового рычага Ф:
Угол Ф лежит в пределах Ф=66…740, однако исходя из зависимости Ф и m/n можно предположить, что угол может иметь большую величину. Выбираем отношение длины бокового рычага к длине поперечной тяги из соотношения m/n=0,12…0.16. Длина бокового рычага m выбирается возможно большей по условию компоновки. Примем m=0,32м.
Тогда длина поперечной тяги:
![]()
Практическое
использование графика ускорений автомобиля
По графику ускорений автомобиля определяем следующие показатели: 1. Максимальное ускорение ахmax: ахmax = 2,074 . 2. Скорость автомобиля при максимальном ускорении Vaxmax: Vaxmax = 25,678 км/ч. 3. Максимальное ускорение на высшей передаче ax5max: ax5max = 0,415 . 4. Скорость автомобиля на высшей пе ...
Способы доставки туристов в туристские центры Франции
Практическая часть работы посвящена рассмотрению различных способов доставки туристов в туристские центры Франции, а именно в столицу республики – Париж и на остров Корсика. После анализа способов доставки в эти туристические центры, будут рассмотрены способы передвижения внутри городов, а также на ...
Плавность хода, вибрация, шум
Основными оценочными показателями плавности хода являются уровни вибронагруженности водителя, пассажиров, грузов и характерных элементов шасси и кузова. Оценка уровня вибронагруженности производится по средним квадратичным значениям ускорений колебаний (виброускорений) или скоростей колебаний (вибр ...


